Sistema de navegação para cegos através
de sensor ultrassônico e motor de vibração
LAVRAS, 2021
Mateus Meireles Silva
Ana Laura Teixeira Ramos
Vídeo também
disponível através do link: https://www.youtube.com/watch?v=wESgvTAOepY&ab_channel=MATEUSMEIRELESSILVA
1 Resumo
Baseado em
estudos e pesquisas anteriores, foi comprovado que tecnologias Electronic
Travel Aid (ETA) ou Auxílio Eletrônico de Viagem auxiliam pessoas cegas a
se locomoverem.
Com um intuito
de criar um dispositivo de tecnologia ETA, o presente trabalho mostra a
construção de um protótipo de auxílio para deficientes visuais, que é baseado
em um mapeamento de ambiente através de sensores ultrassônicos e transmissão da
posição dos obstáculos para o usuário através de motores de vibração. O
circuito utilizou equipamentos como Arduino, sensores HC-sr04, motores de
vibração de celulares, servo motor, LEDs, etc, e foram posicionados em um
cinto.
Vários
desafios foram encontrados na construção do protótipo e do código do circuito,
o que fizeram com que algumas mudanças fossem tomadas ao decorrer do projeto.
Ainda assim, foi possível realizar a construção de um dispositivo útil e
funcional, com perspectivas de desenvolvimento e melhoramento futuro para o
projeto.
2 Objetivo
O presente trabalho
tem o objetivo de desenvolver um protótipo de um dispositivo discreto,
confortável e de baixo custo que permitirá maior conforto e facilidade de
locomoção para pessoas cegas ou com baixa visão. O propósito do dispositivo
será auxiliar instrumentos como a bengala ou cão guia, de forma que possam se
complementar.
Além disso, almeja-se o
aprendizado da construção prática do circuito, enfatizando conceitos sobre
circuitos eletrônicos, sensores ultrassônicos, servo motores, funcionamento do
Arduino, linguagem C++, entre outros.
3 Introdução
Pessoas cegas
ou com deficiência visual encontram sérios problemas em ter uma vida
independente devido a sua pouca percepção do ambiente. Novos ambientes
representam um grande desafio para eles perceberem seus arredores sem buscar a
ajuda de outras pessoas. A incapacidade de se mover livremente e
independentemente pode dificultar a plena integração do indivíduo na sociedade,
especialmente quando a perda de visão ocorre após a vida adulta [2].
Dessa forma, se
vislumbra claramente a necessidade de melhorar a qualidade de vida dessas
pessoas, seja pela inclusão social ou seja pela implementação de novas
tecnologias de acessibilidade. Atualmente, o uso da bengala e de cães guias são
muito comuns, entretanto, algumas limitações da bengala envolvem um alcance limitado
de varredura (1 a 2 m), dificuldade de uso em locais com muitas pessoas e
nenhuma detecção de obstáculos pendentes, enquanto o cuidado constante e o alto
custo dos cães-guia podem não agradar a todos as pessoas cegas [3].
Com
o objetivo de melhorar a mobilidade de pessoas cegas ou com baixa visão,
existem as tecnologias Electronic Travel Aid (ETA) ou Auxílio Eletrônico
de Viagem, que ajudam os cegos a se moverem livremente em um ambiente,
independentemente de suas mudanças dinâmicas [4]. Décadas de pesquisa e uma
ampla variedade de protótipos acadêmicos e produtos comerciais mostraram que
qualquer tentativa de substituir os auxiliares primários, como cão-guia e
bengala, falhou. O presente trabalho, portanto, mostra uma tecnologia para
auxiliar aos métodos convencionais, mas não para substituí-los [3].
As tecnologias
ETA estão separadas para ambientes internos e externos. Soluções para
configurações internas exploram o mapeamento do ambiente através de câmeras,
sensores infravermelhos, sensores de ultrassom, identificação por
radiofrequência (RFID), dispositivos de comunicação sem fio, entre outros [4].
4 Objeto de Estudo
Visando
solucionar e amenizar a dificuldade no cotidiano que parte da população
brasileira enfrenta, está sendo proposto a implementação de um sistema de
mapeamento espacial ultrassônico informado através de motores de vibração
acoplados a um cinto para pessoas com necessidades especiais de visão. O
dispositivo foi colocado em um cinto pois esse está em uma altura ideal para
identificar diversos tipos de obstáculos.
Baseando-se nas
tecnologias que são utilizadas para sensores de localização em ambientes
externos e internos [4], foi escolhido a aplicação do sistema de monitoramento
espacial estudado neste projeto em ambientes fechados (indoor), tendo em vista
principalmente a possibilidade de utilizar com maior assertividade o sensor
ultrassônico.
5 Metodologia
O
projeto consiste no mapeamento do ambiente através de sensores de ultrassom,
que determinam a distância entre o usuário e o obstáculo. O sensor ultrassônico
calcula a distância de um objeto medindo o tempo que leva para a onda sonora ir
até o objeto e voltar. Os objetos são detectados independentemente dos níveis
de luz ambiente, cor, material e refletividade [6].
A
partir da distância medida, um código aplicado no microcontrolador do Arduino
permitirá transmitir a informação para o usuário se ele está perto ou longe do
objeto através dos motores de vibração. Essa transmissão será feita a partir de
pulsos programáveis que diminuem o intervalo entre um pulso e o outro, à medida
que o usuário se aproxima do obstáculo.
O
protótipo permitirá que a pessoa saiba a direção do obstáculo: frente, esquerda
e direita. Serão utilizados 5 sensores ultrassônicos e 3 motores de vibração.
Vão ser utilizados três sensores de distância voltados para a frente, um sensor
voltado para a esquerda e outro para a direita. Os três primeiros sensores
serão responsáveis por detectar obstáculos à frente do usuário, este passará a
informação da distância através do motor de vibração, cuja posição se encontra
na parte da frente do cinto vestível. Outros dois sensores posicionados na
esquerda e na direita passarão a informação de obstáculos nas suas respectivas
direções.
Após
um estudo sobre a diversidade de móveis ou obstáculos que se pode ter em um
ambiente fechado como uma casa, ou uma sala de aula, foi pensado um método para
mapear mais amplamente o espaço à frente do usuário. Esse método consiste em
rotacionar os três sensores que estão voltados para a frente no eixo z
espacial, de forma conjunta e em um certo grau de amplitude. Para que esse
movimento de rotação seja possível será utilizado um servomotor em conjunto com
uma estrutura onde os sensores estarão posicionados.
3.1 Materiais Utilizados
- Arduíno
- Protoboard
- Sensores Ultrassônicos Hc-sr04 (5)
- Motores de vibração (3)
- Jumpers Macho-Macho
- Fios diversos
- Cinto
- Velcro
- Fonte de energia 9V
- Solda elétrica
- ServoMotor
- Estrutura de conexão servo motor X sensores.
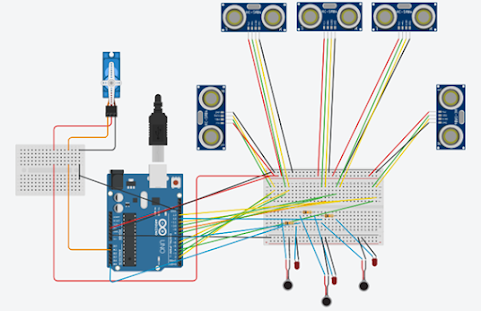
3.2 Montagem teórica do circuito
Primeiramente, o circuito foi formulado e testado na plataforma
Tinkercad:
3.3 Formulação do algoritmo
O algoritmo foi feito de modo a
organizar todas as funções do circuito, desde o comando de rotação do servo
motor, realizando o cálculo da distância através do sinal emitido pelos
sensores ultrassônicos, e transformando a informação da distância em pulsos de
vibração para os motores. Isso tudo está organizado no esquema a seguir.

O algoritmo completo, assim como o
circuito teórico feito na plataforma Tinkercad, pode ser visualizado no link
exibido no ANEXO I.
3.4 Calibragem dos sensores
Antes do circuito ser montado na prática, os sensores foram calibrados
para ser obtida a distância mais exata possível do obstáculo. Esse processo de
calibragem foi feito a partir de um código simples de cálculo da distância
enviado ao Arduino. Assim, ao colocar um objeto a uma medida pré-estabelecida à
frente do sensor, essa medida era comparada à distância fornecida pelo programa
criado. O código utilizado considerou uma distância para a velocidade do som
bem precisa, o que possibilitou a obtenção de distâncias exatas.
3.5 Montagem do circuito final
Para a montagem do circuito final, primeiramente foi feita a marcação de
onde todos os componentes seriam posicionados no cinto, assim foi feita a
medição do tamanho dos fios. Deixando os fios um pouco maiores que o
necessário, as extremidades foram desencapadas e soldadas nos componentes.

Para os motores de vibração, foram feitos pequenos suportes para que ele
fosse colado ao cinto, como mostrado na figura abaixo:

A
fixação dos componentes no cinto foi feita através de velcro, colado com cola
quente no cinto e nos sensores e motores. A estrutura que une os três sensores
da frente e o servo motor foi feita utilizando
papel cartão,
elásticos, fita isolante e um arame 0,5mm como na figura abaixo:

Desta forma, ao unir todos os componentes, o circuito final ficou da
seguinte maneira:
|
|



6 Resultados
Um teste foi realizado por um integrante do grupo, ao tentar se
locomover tendo seus olhos vendados. Os resultados do experimento foram
satisfatórios, visto que o dispositivo funcionou da maneira como era esperada.
Em relação ao conforto o aparelho precisa de novas versões. A grande
quantidade de fios precisa ser melhor projetada. Ou mudar no diâmetro dos fios
ou na flexibilidade dos mesmos, para que pudessem ser mais facilmente dispostos
e escondidos. Outro detalhe referente ao fio, é na parte traseira do cinto,
muitos fios ficaram à mostra e com um certo volume se projetando nas costas do
usuário, isso pode prejudicar na locomoção em certos ambientes. Além do mais,
para se colocar o cinto se demanda boa prática, pois qualquer descuido pode
prejudicar o circuito.
O mapeamento do ambiente foi parcialmente efetivo, percebe-se que para
que seja possível andar seguramente com o dispositivo é necessário vários
testes práticos de situações reais.
7 Análises e Conclusões
Para o futuro do dispositivo, a estrutura frontal necessita de uma
atualização, tanto de uma projeção para uma melhor rotação quanto um material
mais resistente e encaixes mais seguros. Os fios que saem da frente precisam de
uma melhor organização e manufatura. O material ideal para reforçar a estrutura
frontal é o plástico.
Outro detalhe passível de análise é o fato de que existem alguns pontos
cegos na direção que a pessoa anda e a direção que o sensor mapeia, por isso
seria ideal a utilização ou de mais sensores cobrindo os pontos cegos ou de uma
ampliação da movimentação dos radares, incluindo novos eixos de rotação. Outros
componentes que faltam ao dispositivo é uma bateria e um Arduino Nano no lugar
do atual Arduino Uno.
Em termos práticos a maior dificuldade encontrada foi a soldagem de
pequenos fios. Essa soldagem foi complicada pela disposição de ferramentas de
apoio, já que era apenas um indivíduo fazendo a montagem experimental.
Uma possibilidade para o futuro, baseado na própria capacidade do arduíno
é um sistema de reconhecimento e diferenciação entre seres vivos e obstáculos
inanimados. Ademais, é necessário implementar Micro ServoMotores também aos
sensores laterais. Por último, outra implementação futura é o uso de um
sistema inteligente que crie um banco de dados a partir de padrões existentes
da disposição de obstáculos dentro de ambientes fechados.
O projeto permitiu a saída de um campo estritamente teórico, onde não
havia noção de desafios práticos de um projeto de física, tanto em relação à
montagem do algoritmo quanto do circuito ao cinto.
8 Custos

* Esses materiais foram conseguidos ou através
de doações ou nós já os possuíamos.
9 Cronograma

10 Bibliografia
[1] https://educa.ibge.gov.br/jovens/conheca-o-brasil/populacao/20551-pessoas-com-deficiencia.html
[2] GANZ, Aura et al. PERCEPT indoor navigation system for the blind and
visually impaired: architecture and experimentation. International journal
of telemedicine and applications, v. 2012, 2012.
[3] VELÁZQUEZ, Ramiro et al. An outdoor navigation system for blind
pedestrians using GPS and tactile-foot feedback. Applied Sciences, v. 8,
n. 4, p. 578, 2018.
[4] AL-FAHOUM, Amjed S.; AL-HMOUD, Heba B.; AL-FRAIHAT, Ausaila A. A
smart infrared microcontroller-based blind guidance system. Active and
Passive Electronic Components, v. 2013, 2013.
[5] KAY, Leslie. A sonar aid to enhance spatial perception of the blind:
engineering design and evaluation. Radio and Electronic Engineer, v. 44,
n. 11, p. 605-627, 1974.
[6] RAM, Sunita; SHARF, Jennie. The people sensor:
a mobility aid for the visually impaired. In: Digest of Papers. Second
International Symposium on Wearable Computers (Cat. No. 98EX215). IEEE,
1998. p. 166-167.
[7] SHOVAL, Shraga;
BORENSTEIN, Johann; KOREN, Yoram. Auditory guidance with the navbelt-a
computerized travel aid for the blind. IEEE Transactions on Systems, Man,
and Cybernetics, Part C (Applications and Reviews), v. 28, n. 3, p.
459-467, 1998.
[8] MILIOS,
Evangelos et al. Sonification of range information for 3-D space perception. IEEE
Transactions on Neural Systems and Rehabilitation Engineering, v. 11, n. 4,
p. 416-421, 2003.
[9] MAGATANI,
Kazushige; SAWA, Koji; YANASHIMA, Kenji. Development of the navigation system
for the visually impaired by using optical beacons. In: 2001 Conference
Proceedings of the 23rd Annual International Conference of the IEEE Engineering
in Medicine and Biology Society. IEEE, 2001. p. 1488-1490.
[10] MEIJER, Peter
BL. An experimental system for auditory image representations. IEEE
transactions on biomedical engineering, v. 39, n. 2, p. 112-121, 1992.
[11] N. G. Bourbakis and D. Kavraki, “An intelligent
assistant for navigation of visually impaired people,” in Proceedings of the
2001 IEEE 2nd International Symposium on Bioinformatics and Bioengineering
Conference, pp. 230–235, IEEE, 2001.
[12] SAINARAYANAN,
Gopala; NAGARAJAN, R.; YAACOB, Sazali. Fuzzy image processing scheme for
autonomous navigation of human blind. Applied Soft Computing, v. 7, n.
1, p. 257-264, 2007.
[13] FANG, Z. G. et
al. AudioMan: design and implementation of environmental information data
mapping. Chinese Journal of Ergonomics, v. 2, 2007.
[14] NIE, Min et al.
SoundView: an auditory guidance system based on environment understanding for
the visually impaired people. In: 2009 Annual International Conference of
the IEEE Engineering in Medicine and Biology Society. IEEE, 2009. p.
7240-7243.
[15] HAMEED, Sarmad et al. Arduino based radar system. 2019.
ANEXO IO circuito teórico na plataforma Tinkercad e o algoritmo completo
utilizado pode ser acessado no seguinte link: