O motor de passo é um projeto especial de motor elétrico utilizado para posicionamentos precisos ou rotações em ângulo exato, cuja precisão pode chegar, em alguns casos, a milésimos de grau. Ele possui um ímã muito potente e é controlado por uma série de campos eletromagnéticos, ativados e desativados eletronicamente, e produzidos por bobinas instaladas em torno do rotor.
Este motor não possui escovas ou comutadores e seu controle de posicionamento é feito por meio de polos magnéticos (imã permanente) que determinam o número de passos por movimento circular. Os modelos mais comuns possuem 200 passos / volta, o que significa que o motor leva de 200 passos para completar uma volta. Os principais tipos são os de Relutância Variável, Imã Permanente e Híbrido.
Para entender o funcionamento, você precisa conhecer sua composição: um rotor (parte que gira) e um estator (parte fixa). O rotor é um conjunto de eixo e ímã. O estator é um conjunto de bobinas enroladas. Ao passar a corrente elétrica, o rotor gira e cria-se um campo magnético no estator, impulsionando o movimento giratório do motor.
Este motor possui também três pares de bobinas que permitem um acionamento independente, que ocorre quando a corrente elétrica passa num sentido, criando um campo magnético no sentido oposto. Assim, o motor sempre vai se alinhar ao campo criado. Se o sentido da corrente for alterado, o motor se alinha ao novo campo magnético, mudando também o sentido da rotação.
Para operar esses motores é necessário possuir um dispositivo de controlo, geralmente formado por um microcontrolador e um circuito "driver", no nosso caso o microcontrolador será substituído por um circuito eletrônico. Explicitando um pouco mais o circuito "driver", pode-se dizer que o motor de passo precisa deste circuito para funcionar, visto que este faz o controle de pulsos, o gerenciamento de corrente e a proteção do motor, para evitar que o motor seja sobrecarregado com corrente ou excesso de calor.
Fig.1: Circuito Eletrônico, Driver e Motor de Passo
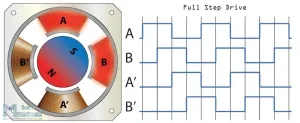
Existem algumas formas de fazer o acionamento do motor de passo, neste projeto em específico foi-se utilizado o método "Half Step Drive", na qual duas bobinas permanecem ativadas ao mesmo tempo, de modo que a bobina anterior é desativada e a bobina seguinte é acionada, gerando pulsos conforme demonstrado na figura abaixo.
Fig.2: Diagrama de pulso em Half Step Drive
O circuito eletrônico utilizado para controlar o motor de passo está apresentado na figura 3. O esquema consiste de um 555 funcionando no modo astável, enviando o sinal para um contador de década DC4017. Em seguida, o arranjo de diodos e resistores do lado direito da imagem é responsável por gerar os sinais da figura 02. As saídas A, B, C e D estão conectadas no driver ULN2003 do motor de passo da seguinte forma: a saída A na bobina 1, a saída B na bobina 2, a saída C na bobina 3 e, por último, a saída D na bobina 4.

Fig.3: Circuito eletrônico para controle do motor de passo
Feita a explicação inicial, podemos introduzir então, a aplicação envolvendo o supradescrito: Como construir um elevador de dois níveis.
Elevador de dois níveis
Materiais para o circuito controlador:
- CI temporizador NE555;
- Contador de década CD4017;
- Porta lógica AND;
- Porta lógica OR;
- Motor de passo + Driver 28BYJ-48-5V;
- Fonte;
- Protoboard;
- Jumpers;
- Botão;
- Resistores;
- Capacitor 10nF;
- Capacitor 1 uF;
- Diodos.
Materiais para a estrutura:
- MDF;
- Isopor;
- Cola madeira;
- Folha de cobre;
- Fios de cobre ou jumpers;
- Cola quente;
- Fio de Nylon;
- Estanho;
- Parafuso de rosca;
- Porcas.
Como já deve ser de entendimento do leitor, o circuito eletrônico apresentado apenas promove o movimento do motor, sem se preocupar com os graus de sua rotação. Sendo assim, como poderá ser construído? E como interromper a rotação (no momento em que ele chega no destino)?
As soluções para os problemas em questão são todas mecânicas:
Primeiramente, o motor fará rodar uma polia, que possui necessariamente um diâmetro de comprimento igual à altura de um andar. Isso permitirá que o elevador saia do seu estado inicial e vá para o estado final com uma rotação de 180° da polia.
Segunda solução: serão construídos dois sensores responsáveis por interromper a rotação do motor, sendo posicionados um no chão do primeiro andar, e outro no teto do segundo andar. Ambos serão do tipo normal-aberto, significando que, na condição de excitação, enviarão sinal lógico 1.
O circuito apresentado na figura 3 mantem o motor ligado por todo o tempo em que a alimentação estiver ativa. Considerando este fato, será necessário adicionar um circuito lógico de modo a controlar quando ele deve ser ligado, além de conter as informações oriundas dos sensores para que possa ser também desligado. Ele deverá ser alocado no terminal de alimentação (Vcc) do contador DC 4017. Abaixo serão mostradas a equação lógica e sua respectiva tabela verdade.
Eq.1 - Equação lógica do circuito
Tabela 1 - Tabela verdade da Eq.1
Os sinais A e B são aqueles provenientes dos sensores e passam por uma porta NOR, enquanto o sinal C vem de um botão e passa por uma porta OR juntamente com o sinal de saída da NOR.
A solução lógica empregada é a seguinte: considerando um estado inicial em que o elevador se encontra no primeiro andar, e sinal enviado pelo sensor inferior será 1, consequentemente, o sensor superior estará enviando 0. Essas entradas na porta NOR, geram uma saída de nível baixo, tornando o movimento dependente do botão. Ao acionar o botão, envia-se a entrada 1 para a porta OR juntamente com a entrada 0, o que resulta em uma saída de nível alto que faz com que o motor de passo inicie a rotação. O mesmo acontece quando o sensor superior é ativado.
Fig.4 - Circuito de controle conectado a estrutura
Explicitado o funcionamento do circuito de controle do elevador de dois níveis, passemos a montagem da estrutura. Foram cortadas 7 peças de MDF na cortadora a laser desenhadas no software RD Works, sendo essas: três peças de 10x20cm com cortes de 0,5x1cm para o encaixe dos sensores; duas peças de 10x10cm, onde uma delas possui um furo de 2mm de diâmetro no centro; uma peça de 12x32cm com um furo de 4x4cm para o encaixe do motor de passo e um círculo de 9cm de diâmetro que será utilizado como polia. Todas essas peças foram coladas com cola de madeira e deixada 3 dias em descanso para secagem completa.
Após a secagem da estrutura do poço do elevador, foi colocado o motor de passo na peça maior e parafusado para que ele se mantivesse fixo. Posteriormente, foram recortados 5 tiras finas de uma folha de cobre no formato retangular para servirem de sensor de fim de curso. Em cada uma dessas tiras foram soldados fios com estanho para que pudessem enviar sinal para o circuito de controle. Como podemos observar na figura 4, duas das tiras foram encaixadas nos furos da parede lateral para que pudessem ter contato com o elevador, enquanto as demais foram fixadas exteriormente, onde ficou definida que duas delas seria conectada ao sinal de entrada 0 e a outra ao sinal 1.
Fig.5 - Estrutura do elevador conectada ao circuito
Terminada a montagem dos sensores e feita a conexão das tiras que estão no furo lateral a porta NOR, passou-se a montagem da polia. Inicialmente, foi fixado um parafuso de rosca a polia e adicionada mais duas roscas na ponta para que o fio de nylon ficasse posicionado no mesmo eixo que o furo do elevador. Em seguida, a polia foi fixada ao motor de passo com cola quente.
Posteriormente, foram recortada 5 placas de isopor formando uma caixa com 4 lados, com 1 placa a mais na parte de baixo, onde todas as placas foram coladas com cola quente e na superior foi feito um furo para que fosse passado o fio de nylon. Após amarrar o fio de nylon na caixa de isopor, este foi anexado ao parafuso da polia e foram iniciados os testes. Seguem os vídeo abaixo.
Vídeo 1 - Teste de funcionamento do sensor
Vídeo 2 - Teste de funcionamento do botão
Concluídas as partes de teste dos componentes individualmente, foi feito o teste final do funcionamento do elevador de dois níveis apresentado no vídeo 3. Além disso, o projeto como um todo foi explicado brevemente no vídeo 4.
Vídeo 3 - Teste final do funcionamento do sensor
Vídeo 4 - Breve apresentação sobre o funcionamento do elevador
No mais, para uma análise mais geral do projeto acesse o
link 1 da referência bibliográfica para ter acesso ao slide de apresentação. Caso tenha alguma dúvida pontual sobre o funcionamento, entre em contato com os autores do artigo através do e-mail na área de contatos ou pelo e-mail geral do projeto descrito na mesma área.
Referências Bibliográficas
[1] AUGUSTO, Raissa F.; FERREIRA, Anna Beatriz; ONÓRIO, Duanny Silva. SOUSA, Marcos Vinicius F. Elevador de dois níveis: Aplicação do acionamento de um motor de passo. Disponível em: <https://www.canva.com/design/DAFo_gSK4LE/M4yyM4kbKvxJdhg5w1c4DQ/edit?utm_content=DAFo_gSK4LE&utm_campaign=designshare&utm_medium=link2&utm_source=sharebutton>.
[2] Controlando um motor de passo com arduino. Módulo Eletrônica, 2018. Disponível em: https://blog.moduloeletronica.com.br/controlando-um-motor-de-passo-com-o-arduino/. Acesso em: 18 de julho de 2022.
[3] MOSS, Gregory L.; TOCCI, Ronald J.; WIDMER, Neal S. “Sistemas Digitais – Princípios e Aplicações”, 10ª Edição. Prentice Hall.
[4] SILVA, Ordelano. Controle de Motores de Passo sem saber programar. AutoCore Robótica Blog, 2022. Disponível em: <https://autocorerobotica.blog.br/controle-motores-de-passo-sem-saber-programar/>. Acesso em: 18 de julho de 2022.
Autores
[1] Anna Beatriz Ferreira
[2] Duanny Silva Onório
[3] Marcos Vinícius Figueiredo de Sousa
[4] Raissa Ferreira Augusto
Alunos do 7° período de graduação em Engenharia Física pela Universidade Federal de Lavras, discentes da disciplina de Projetos em Eletrônica Digital ministrada pelo professor Dr. Jose Alberto Casto Nogales em 2023/1.
Contato
[1] anna.ferreira2@estudante.ufla.br
[2] duanny.onorio@estudante.ufla.br
[3] marcos.sousa4@estudante.ufla.br
[4] raissa.augusto1@estudante.ufla.br
[5] projectelavator@gmail.com