
Rastreador Solar Controlado por Arduino
202020255 Adalberto Moreira Filho
202020667 Jéssica Silva Corrêa
202020493 Marcelino Reis Machado
LAVRAS/MG
2022
SUMÁRIO
INTRODUÇÃO
A energia elétrica é uma das formas de energia que o homem mais depende e utiliza na atualidade, graças a sua facilidade de transporte. Indispensável para a nossa sociedade, a matriz elétrica brasileira é composta, majoritariamente, por hidrelétricas e termelétricas [1] (que utilizam diversas fontes como: combustíveis fósseis, carvão mineral, gás natural, nuclear e biomassa). Assim, o Brasil é um dos países com a matriz elétrica mais renovável do mundo, segundo a IEA.
No entanto, a utilização e expansão da hidroeletricidade encontram limitações em relação às questões ambientais envolvidas, como a construção das usinas e a crise hídrica vivenciada pelo país desde 2014. Com esse recurso natural escasso, a oferta de energia diminui, acarretando elevação dos preços da energia no país. Além disso, nos períodos de menor incidência de chuvas, o uso dessa água para geração de energia impacta criticamente no uso desse recurso para outros fins, tais como agricultura ou abastecimento.
Com a alta demanda de energia elétrica, têm-se as termelétricas que, no entanto, é desvantajosa no ponto de vista ambiental, em virtude do aumento das emissões de Gases de Efeito Estufa associadas à queima de combustíveis fósseis, e do ponto de vista financeiro, devido às condições de geração relativamente mais custosas, revertidas em aumentos de tarifas [2].
Desse modo, a energia solar é uma forte alternativa renovável e uma opção viável para regiões do Brasil em que não há alta incidência de fortes ventos. Essa se apresenta como uma excelente opção para complementação de fontes convencionais de energia já consolidadas como as hidroelétricas. O aproveitamento do recurso solar favorece o controle hídrico nos reservatórios, especialmente nos períodos de secas, e possibilita planejamento em geração, transmissão e distribuição da energia. A energia solar pode ser convertida em calor, o qual pode ser utilizado diretamente para o abastecimento de residências com água quente, ou em eletricidade, através do efeito fotovoltaico, nas células solares.
O Sol é a base para tudo que existe no Sistema Solar, desde rochas e bactérias menores que a cabeça de uma agulha até os animais mais complexos que habitam o planeta Terra, todos existem por conta da existência do astro rei, cuja influência se estende por todo o Sistema Solar.
Um importante acontecimento ocorreu em 1839, quando Edmond Becquerel descobriu o efeito fotovoltaico, em que notou o surgimento de uma diferença de potencial nos terminais de uma célula eletroquímica, ao expô-la à luz solar (GTES,2014).
Em 1873, Willoughby Smith descobriu que o selênio possui propriedades fotocondutoras, possibilitando que em 1876, William Grylls Adams e Richard Evans Day, concluíram que este mesmo elemento produz eletricidade ao ser exposto à luz solar. Em 1883, Charles Fritts, inventou a primeira célula solar da história, feita de Selênio (BLUESOL, 2017).
Somente em 1954, após pesquisas que se iniciaram por volta de 1952, foi apresentada ao mundo a primeira célula solar de Silício (elemento usado atualmente na produção de células fotovoltaicas), produzida em conjunto por Calvin Fuller, Daryl Chapin e Gerald Pearson, pesquisadores da Bell Labs (NREL, 2004). Esta célula possuía uma eficiência de conversão da luz solar em eletricidade de aproximadamente 4%, o que representa menos de um quarto da eficiência das células atuais (ENERGYSAGE, 2017).
As células solares são dispositivos que convertem energia elétrica através da absorção da luz do sol. A constituição básica de uma célula solar é baseada em duas camadas de semicondutores (junção), sendo uma camada contendo carga positiva (p) e outra contendo carga negativa (n), que geram corrente elétrica quando expostas à radiação solar [3].
Segundo GTES (2014), a crise do petróleo em 1973 aumentou o interesse na criação de aplicações terrestres para a energia solar fotovoltaica, sendo que seria necessário diminuir o custo de produção de células solares, para tornar o investimento neste segmento viável.
Com o passar dos anos, foram obtidos grandes avanços na produção de células fotovoltaicas, com processos de dopagem, obtendo-se rendimentos em laboratório de cerca de 25 % (GREEN et al., 2013, apud GTES, 2014). Consequentemente, têm sido cada vez mais comum ver painéis solares instalados nos telhados de residências, além da criação de parques solares, onde são instalados milhares de painéis fotovoltaicos para a produção de energia elétrica em larga escala.
Um exemplo de parque solar em operação no Brasil é o Parque Solar Lapa, localizado na cidade de Bom Jesus da Lapa, estado da Bahia, sendo o maior de seu tipo no país é composto por duas usinas com capacidade total de 158 MW. O empreendimento pode suprir as necessidades de eletricidade de aproximadamente 166 mil famílias numa região que frequentemente enfrenta períodos de seca, podendo gerar 340 GW por ano e evitando a emissão de 198 mil toneladas de dióxido de carbono (CO2) na atmosfera (PORTAL SOLAR, 2017). Na Figura 1, pode-se ter um vislumbre deste parque solar.
Figura 1. Parque Solar Lapa.

Fonte: (PORTAL SOLAR, 2017).
A tendência é que empreendimentos como o Parque Solar Lapa se tornem cada vez mais comuns ao longo dos próximos anos, em especial num país como o Brasil, que apresenta índices solares de 1642 kWh/m², sendo superior a 1300 kWh/m², apresentado pela região de maior incidência solar da Alemanha (maior produtor mundial de energia solar fotovoltaica) (SALAMONI e RÜTHER, 2007, apud CABRAL, TORRES e SENNA, 2013).
Levando-se em conta um parque solar como o de Bom Jesus da Lapa, pode-se imaginar que exista um grande esforço dos engenheiros que ali trabalham para que a usina opere com a melhor eficiência possível, de modo que se evitem gastos em demasia com manutenções e que se mantenha um registro de como tudo está ocorrendo em cada ponto do parque.
Neste cenário, podem-se buscar várias maneiras de se aumentar o rendimento de um painel solar, como adicionar um sistema de controle para que a placa literalmente possa seguir o Sol, buscando captar o máximo possível de luz solar ao longo do dia.
Este sistema de controle pode ser chamado de rastreador ou seguidor solar. Conforme Oliveira (2007), um módulo fotovoltaico produz eletricidade a partir da componente de radiação solar que incide perpendicular ao seu plano, fazendo com que haja uma maior geração quando o módulo está totalmente de frente para o Sol. Com isso, o uso de um seguidor solar pode aumentar a produção de energia ao se manter os módulos fotovoltaicos perpendiculares aos raios solares durante o maior período de tempo possível.
De acordo com Castañeda (2011), existem dois tipos de rastreadores solares: os passivos e os ativos. Os passivos não utilizam nenhum controle eletrônico, sendo que sua movimentação ocorre por conta da radiação solar que incide sobre o mecanismo que possui em cada extremidade da placa, um vaso cilíndrico abastecido com um fluido mantido a certa pressão. No início do dia o painel está inclinado para a direção Oeste. Como o Sol nasce a Leste, o fluido que está no lado Leste evapora, sendo transferido para o lado Oeste. Dessa forma a placa se move através do desequilíbrio de massa provocado no sistema. Um exemplo de seguidor solar passivo pode ser visto na Figura 2.
Figura 2. Seguidor Solar Passivo.

Fonte: (OLIVEIRA, 2007).
Os rastreadores ativos possuem um sistema eletrônico que controla a posição da placa solar em função da leitura de sensores, como os de luminosidade. O movimento pode ser feito através de atuadores ou motores de passo, por exemplo (LIRA, 2014). Oliveira (2007) ainda cita que o seguidor solar ativo pode trabalhar em um ou dois eixos. O primeiro tem seu eixo na direção Norte-Sul, com seu arranjo girando de Leste a Oeste para se alinhar com o Sol ao longo do dia, como pode ser visto na Figura 3. O seguidor de dois eixos possui um segundo eixo, que permite o ajuste da inclinação da placa, podendo se adaptar às inclinações do Sol ao longo do ano.
Figura 3. Rastreador Solar Ativo.

Na literatura existem vários trabalhos que descrevem protótipos de rastreadores solares, sendo que alguns destes implementam também, um supervisório. Para este trabalho, foi escolhido como supervisório o Excel, que é um editor de planilhas para aquisição de dados e controle, tendo como público-alvo profissionais da área de controle, universitários e também indústrias. O Excel permitiu realizar o armazenamento de dados de forma segura e simplificada para que, posteriormente, fosse criado um relatório de dados.
1.1. OBJETIVOS
Utilizar a plataforma Arduino para controlar um Rastreador Solar e envio de dados do mesmo para o Excel, de modo a obter dados da corrente elétrica que cada placa solar gera durante certo tempo, mostrando, através disso, uma maior eficiência do rastreador solar em relação ao painel estático.
1.2. JUSTIFICATIVA
Este trabalho possui relevância por conta do fato de que há uma possibilidade de se aumentar a eficiência na geração de energia solar fotovoltaica através do uso de um Rastreador Solar. Sendo que o uso de seguidores solares pode acarretar num ganho de 20 a 45% na produção de energia, em relação a sistemas com placas fixas, de acordo com a companhia catalã Valdoreix Greenpower, conforme apresentado na Figura 4.
Figura 4. Comparação de Sistemas de Placa Fixa e Rastreador Solar.

Fonte: Adaptado de (VALDOREIX GREENPOWER, 2017).
Com isso, o protótipo produzido neste trabalho serve de referência para aplicações reais, e também para futuros trabalhos acadêmicos, que poderão vir a fazer melhorias, podendo usar outras opções de controladores e supervisórios.
2. REFERENCIAL TEÓRICO
A conversão de energia luminosa para energia elétrica acontece por meio do efeito fotovoltaico, o qual converte a energia do sol em energia elétrica por meio de células solares como, por exemplo, a de silício cristalino que compõe 97,5% do mercado (FRAUNHOFER INSTITUT FOR SOLAR ENERGY SISTEMS, 2019).
A célula fotovoltaica é um dispositivo composto por materiais semicondutores que recebem tratamentos químicos diferentes, de modo que, quando são excitados por fótons solares produzem elétrons livre capazes de conduzirem eletricidade sob efeito de um campo elétrico externo.
Uma única célula de silício cristalino fornece uma tensão muito pequena para aplicações reais, sendo de 0,5V e 0,8V (PINHO; GALDINO, 2014, p.144). Por isso é possível associar as células em paralelo e assim aumentar a corrente fornecida mantendo a tensão constante, formando um módulo fotovoltaico. Portanto, a maioria dos módulos disponíveis comercialmente visam o aumento de tensão associando as células em série.
O módulo também é formado por componentes que visam o seu isolamento mecânico, térmico e elétrico. Para protegê-las, as células são encapsuladas com vidro temperado de alta transparência e uma camada de EVA na parte de cima. Na parte de baixo, mais uma camada de EVA, um filme isolante e, por fim, uma estrutura de alumínio anodizada (PINHO; GALDINO, 2014).
Alguns fatores são determinantes na instalação de um sistema fotovoltaico. A potência, localização, inclinação, radiação incidente, a temperatura de operação dos módulos e o sombreamento são alguns deles. Aumentando a temperatura e/ou a irradiância incidente, a temperatura da célula aumentará ocasionando uma perda de tensão e de potência gerada, reduzindo sua eficiência (PINHO; GALDINO, 2014). Por conta disso, painéis fotovoltaicos tendem a ter boa produção de eletricidade mesmo em dias nublados, quando a temperatura ambiente tende a ser menor.
Em nosso hemisfério, que é o Sul, a melhor orientação para o sistema fotovoltaico é o norte geográfico – que não é o norte magnético, apontado pela bússola, a diferença entre o norte geográfico e o magnético oscila entre 20° a 30°.
Painéis apontados para o oeste ou para o leste são eficientes, porém oferecem resultados inferiores aos oferecidos pelos sistemas orientados para o norte de acordo com a empresa HCC Energia Solar [4]. Painéis direcionados para o oeste perdem irradiação durante a manhã e painéis direcionados para o leste perdem irradiação à tarde. Já painéis com orientação norte podem apresentar variações de eficiência de acordo com a estação: uma inclinação maior terá melhor desempenho no inverno, enquanto uma menor inclinação terá melhor desemprenho no verão.
A possibilidade da construção de um painel fotovoltaico com base automatizada, cuja inclinação varia de acordo com a posição dos raios solares visa um novo conceito de eficiência. Na cidade de Lavras, de acordo com o site METOCAST [5], a duração do dia é de aproximadamente 12 horas, dessa maneira, o painel automatizado visa captar a maior porcentagem possível de irradiação solar durante esse tempo, de acordo com as condições atmosféricas locais.
Com o intuito de resultados precisos, para evitar a interferência da área, pretende-se construir dois painéis idênticos, um com a base automatizada e outro com a base fixa, e estudar ambas as eficiências quando colocados em um mesmo local equivalente a dia, hora e data.
Por tanto, fatores relacionados com a perda de tensão em relação ao aumento da temperatura das células não será levado em consideração. O objetivo desse estudo é analisar, exclusivamente, se o painel fotovoltaico com a base automatizada proporcionará uma maior eficiência energética em mesmas condições de perda ou ganho de tensão e corrente em relação ao painel de base fixa.
Caso seja comprovado uma melhor eficiência para o painel com base automatizada,
2.1 ARDUINO.
Arduino é uma plataforma de código aberto, facilitando sua aplicação por meio do uso do hardware e software, sendo capaz de ler entradas (dados de sensores) e usá-las para acionar saídas de acordo com a programação determinada pelo usuário nas linguagens C/C++ (ARDUINO, 2018).
Devido o fácil aprendizado, baixo custo, tamanho reduzido e sua compatibilidade com os mais variados sistemas operacionais, esta placa é uma boa opção para ser o controlador do sistema (ARDUINO, 2018).
É importante lembrar que existe uma variada gama de Arduino, como o UNO, DUE, Mega, Nano, Pro Mini, etc. O modelo utilizado neste trabalho foi o UNO ( FIGURA 5), por conta da sua versatilidade, facilidade de uso e aquisição. O microcontrolador do Arduino UNO é o ATMega328, da família AVR da Atmel, que possui 14 pinos digitais e 6 analógicos (ROCHA, 2017).
Figura 5. Arduino UNO.
 |
| Fonte: (ARDUINO, 2017). |
A programação do Arduino é realizada por meio do Arduino IDE, que pode ser baixada diretamente no site oficial do Arduino gratuitamente. Ao conectar o cabo de comunicação da placa com o computador, basta selecionar a placa correta no menu Tools para enviar o código à mesma.
2.2. PLACA FOTOVOLTAICA
Uma placa fotovoltaica é um aparelho que possui o objetivo de produzir eletricidade
Na Figura 6, pode-se observar o exemplo de uma Mini Placa Solar Fotovoltaica de 5,5V e 240mA, a mesma utilizada no projeto.
Figura 6. Mini Placa Solar Fotovoltaica 5,5V, 240mA.
 |
| Fonte: Próprio Autor. |
2.3. SENSORES LDR
O componente LDR (Light Dependent Resistor) é um resistor que varia a sua resistência em função da luminosidade que incide sobre o mesmo, ou seja, quanto mais luz incidir sobre o LDR, menor será a sua resistência. De acordo com a sua especificação técnica, sob uma luminosidade de 10 lux, a uma temperatura de 25 ºC, a sua resistência estará na faixa de 8 a 20 kΩ. No escuro (luminosidade a 0 lux), a resistência poderá chegar a 1.0 MΩ (CDS, 2018). O sensor pode ser observado na Figura 7.
Figura 7. Light Dependent Resistor.
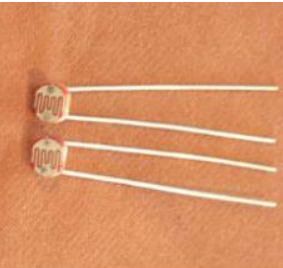 |
| Fonte: (CDS, 2018). |
2.4. SERVOMOTOR
Os servo motores são usados em várias aplicações quando se deseja movimentar algo
Na Figura 8, pode-se observar um Micro Servo Motor 9G SG90 180°, o mesmo utilizado no projeto.
Figura 8. Micro Servo Motor 9G SG90 180°.
 |
| Fonte: Próprio Autor. |
2.5. SENSOR DE CORRENTE
De acordo com o Blog Master Walker, o Sensor de Corrente (AC e DC) ACS712 possibilita realizar a leitura de corrente alternada (AC) e contínua (DC). Este sensor utiliza efeito hall para fazer a detecção do campo magnético que é gerado pela passagem da corrente e no pino de saída do mesmo é identificado uma tensão proporcional à entrada. Os terminais de ligação são totalmente isolados da saída do MCU (microcontrolador).
Este sensor (FIGURA 9) é comumente aplicado em projetos de automação residencial, onde é necessário monitorar o consumo de um equipamento elétrico (dentro das especificações do sensor), por exemplo.
 |
| Fonte: Próprio Autor. |
2.6. RASTREADOR SOLAR
Um painel solar gera eletricidade a partir da componente de radiação solar que incide perpendicularmente ao seu plano, fazendo com que ocorra uma maior geração quando o painel está literalmente de frente para o Sol (OLIVEIRA, 2007).
Um modo de se maximizar a produção de energia solar que pode ser aplicado é fazendo-se uso de um seguidor solar, que terá a função de manter os painéis solares sempre perpendiculares ao Sol, devendo ter uma boa precisão, além de ser capaz de operar por longos períodos de tempo.
Na literatura existem diversos artigos e teses sobre o uso de um Rastreador Solar. Ribeiro, Prado e Gonçalves (2012), produziram um seguidor utilizando um microcontrolador PIC 16F877, baseando-se nas leituras de 4 LDR (sensores de luz) posicionados nas posições norte, sul, leste e oeste. Foram usados dois motores de passo, um para controlar o movimento norte/sul da placa e o outro para regular a posição leste/oeste da mesma.
Já Hossain et al. (2015) utilizou a plataforma Arduino para o controle de um Rastreador Solar, cujos movimentos de inclinação e rotação da placa são feitos por servomotores a partir das leituras de quatro LDR.
2.7. EXCEL
Excel ou Microsoft Excel é um aplicativo de criação de planilhas eletrônicas. Foi criado pela Microsoft em 1987 para computadores que usam o sistema operacional da empresa. A primeira versão do Excel foi lançada para o Mac em 1985 e a primeira versão para Windows (numerada 2.0 para se alinhar com o Mac e distribuída com um runtime do ambiente Windows) foi lançada em novembro de 1987. A Lotus foi lenta em trazer o 1-2-3 ao Windows e, por volta de 1988, o Excel havia começado a passar o 1-2-3 em vendas e ajudou a Microsoft a alcançar a posição de liderança no desenvolvimento de software para o PC. Essa conquista, destronando o rei do mundo do software, solidificou a Microsoft como um competidor válido e mostrou seu futuro de desenvolvimento de software gráfico (MEYER, 2018).
Na literatura existem diversos projetos que enfatizam a utilidade do Excel, seja para organização ou armazenamento de dados. O Engenheiro Elétrico Daniel Madeira (2017) formulou uma aquisição de dados para o Excel utilizando o Arduino, afirmando que o Microsoft Excel, que por sua vez é um dos, senão o mais utilizado, ambiente para manipulação direta e fácil de grandes quantidades de informação.
Sendo assim, o Excel se torna uma boa alternativa para armazenamento de dados referente a corrente elétrica por meio do Arduino, da forma que, de acordo com a Lei de Ohm, assim designada em homenagem ao seu formulador, o físico alemão Georg Simon Ohm, a corrente elétrica pode ser calculada pela divisão da tensão elétrica pela resistência, de acordo com a fórmula: I = U/R.
3. MATERIAIS UTILIZADOS
1 Arduino Uno SMD;
1 Cabo USB para Arduino;
2 Mini Painel Solar Fotovoltaico de 5,5V, 240mA- 64,7x135mm
1 Estrutura em MDF para o Rastreador Solar;
1 Estrutura em MDF para o Painel estático;
2 Micro Servo Motor 9g SG90 180°;
2 Pacote de Jumpers Fêmea-Fêmea (15 uni);
2 Pacote de Jumpers Macho-Macho (15 uni);
2 Pacotes de Jumpers Macho-Fêmea (15 uni);
4 LDR Sensor de Luminosidade de 5mm;
4 Resistores 330R;
2 Resistores 33R;
5 Parafuso M3x10mm;
5 Parafuso M3x6mm;
1 Extensor de portas 0 a 6V, 10 saídas com Jack P4-EPX 10;
2 Sensor de Corrente ACS712 (0 a 30A).
4. PROCEDIMENTO EXPERIMENTAL
Dando início ao experimento, foi feita a modelagem 3D das peças para impressão e montagem da base tanto do rastreador solar, quanto da base fixa. Dessa forma, temos um protótipo mais firme e apto às variações que podem ocorrer durante a aquisição de dados como: chuva, ventos fortes, sujeira, vibrações, entre outras variações que podem ocorrer. Segue a visualização do modelo 3D das peças (FIGURA 10).
Figura 10. Modelagem 3D de peças.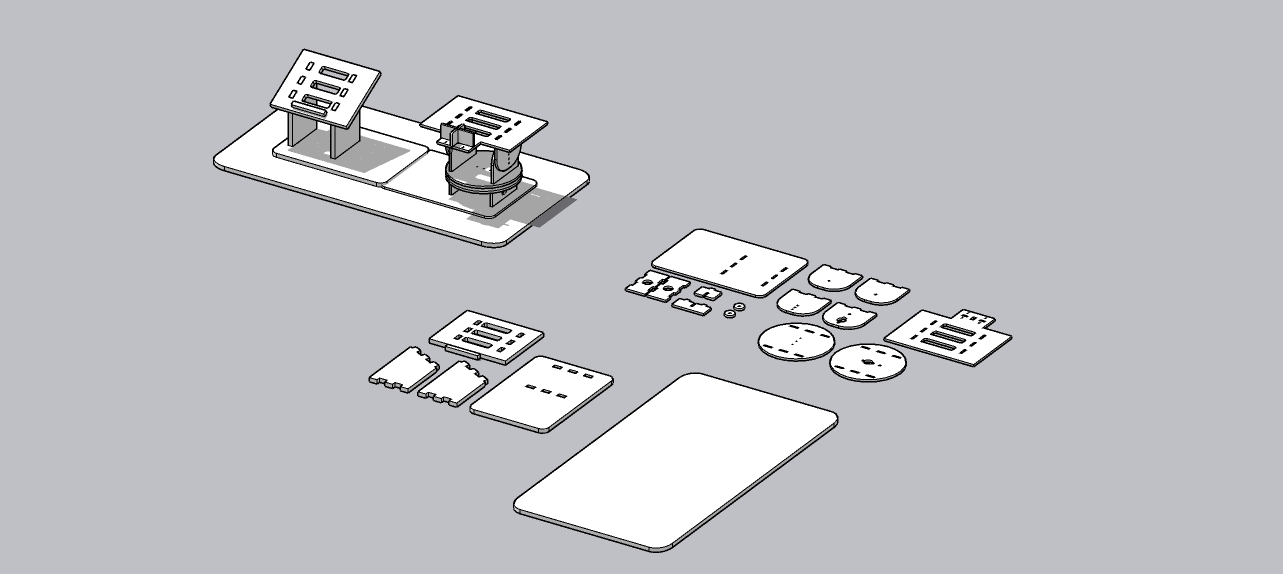 |
| Fonte: Do autor. |
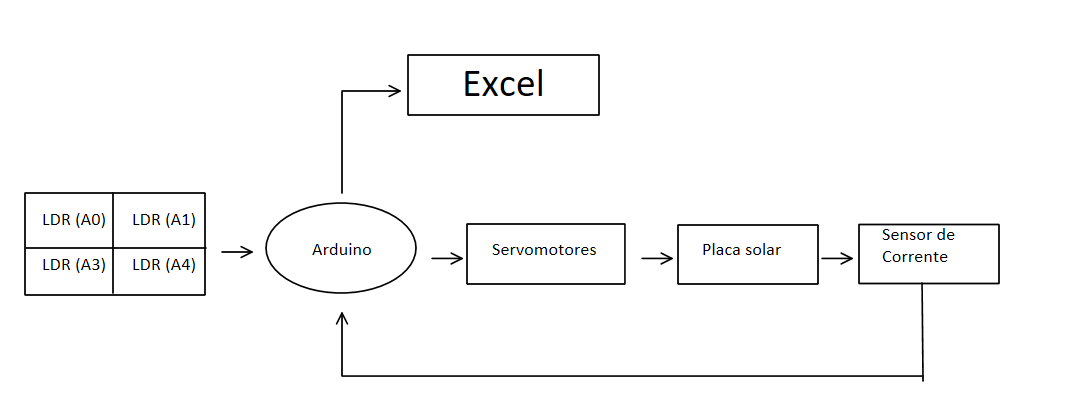
O Arduino é o responsável por fazer o seguidor solar funcionar corretamente a partir de sua programação disponibilizada no Anexo 1 e por transmitir os dados em relação à corrente gerada de ambos os painéis para o Excel. Com isso fizemos a montagem do circuito para o rastreador se mover de acordo com a programação e em seguida elaboramos o circuito para análise da corrente que passará das placas para o sensor de corrente onde a transmissão é feita por um resistor. Segue as imagens dos esquemas de montagem dos circuitos das bases, circuito do rastreador e o protótipo montado (FIGURA 11e 12).
Figura 11. Esquema de montagem do Circuito para o Rastreador Solar.
 |
| Fonte: Do autor |
Figura 12. Esquema de montagem do circuito do Painel Fixo.
 |
| Fonte: Do Autor. |
Figura 13. Circuito do Rastreador Solar.
 |
| Fonte: Do Autor. |
A partir das leituras dos LDR (Light Dependent Resistor) efetuadas por meio do Arduino, é enviado um comando ao servomotor para se movimentar, de forma que há duas paredes perpendiculares entre si responsáveis por separar os quatro LDR. A posição ideal, para captação dos raios solares, é quando nenhum dos sensores estão sombreados pelas duas paredes que os separam. Com isso, o sistema busca sempre manter os sensores em contato direto com os raios solares e movimenta a estrutura caso ocorra sombra em algum dos LDR. Para a análise da corrente, os sensores enviam os dados para o Arduino que por sua vez manda os dados para o Excel em tempo real durante o funcionamento do protótipo, dessa forma é possível fazer as análises desejadas com gráficos e tabelas. Para isso será utilizado um macro no excel que conecta ao Arduino e faz o preenchimento das células da maneira que programamos. Segue a exibição da macro (FIGURA 13).
Figura 13. Macro que conecta o Arduino ao Excel.
 |
| Fonte: Do Autor. |
Após o início do funcionamento, podemos ver qual dos painéis vai fornecer mais corrente e comparar com os dados obtidos no Excel. Segue o protótipo montado (FIGURA 14).
Figura 10. Protótipo montado.
 |
| Fonte: Do Autor. |
5. RESULTADOS E DISCUSSÃO
Na primeira coleta de dados, no período da tarde, tivemos variações pequenas entre os painéis, gerando correntes parecidas, segue o gráfico da primeira análise, cujo Sensor R se refere ao de base automatizada e o Sensor E para o de base estática (GRÁFICO 1).
Gráfico 1. Variação da corrente pelo tempo entre os painéis (período da tarde).
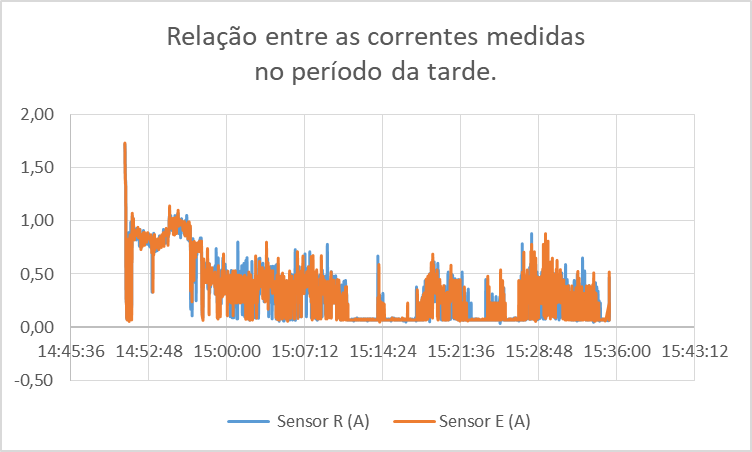 |
| Fonte: Do Autor. |
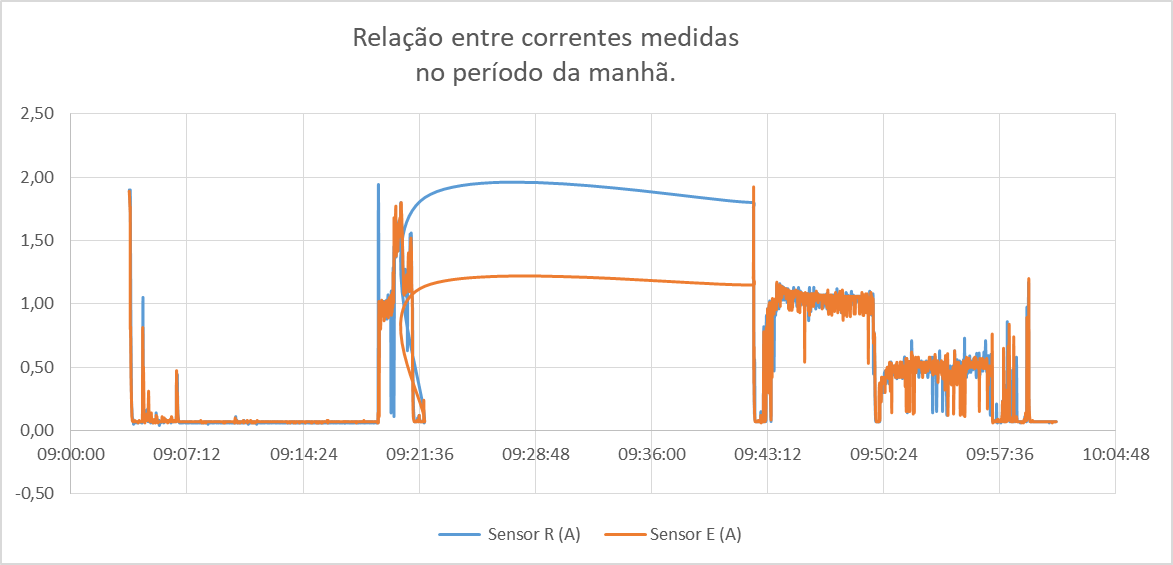
Na segunda coleta de dados, no período da manhã do dia seguinte, as variações de corrente entre os painéis permaneceram pequenas, porém com uma maior eficiência do rastreador solar em relação ao painel estático. Segue gráfico da segunda análise(GRÁFICO 2).
Gráfico 2. Variação da corrente pelo tempo entre os painéis (período da manhã).
 |
| Fonte: Do Autor |
Podemos fazer algumas considerações em relação aos dados obtidos, em relação aos gráficos, vemos que quando está próximo de 0 é por que está com sombra devido a nuvens ou algum objeto, os picos de corrente são quando o sol acaba de sair da nuvem e as placas recebem os raios solares. Através dos dados obtidos tivemos uma média de 0,37489 A para o Rastreador Solar e uma média de 0,37310 A para o painel fixo, o que nos mostra que o rastreador conseguiu emitir uma corrente um pouco maior em relação ao painel estático.
6. CONCLUSÃO
De acordo com a análise de dados obtidos experimentalmente em função do projeto, foi possível concluir que a utilização do rastreador solar em conjunto com os outros equipamentos como o Software Arduino e a Base Automatizada resultou em uma eficácia na captação de energia solar e consequentemente na geração de energia elétrica se comparada à da placa solar de Base Estática.
No experimento, um dos principais fatores que mais influenciaram no resultado final foi a angulação da placa gerada pelos sensores e o servo motor , que foi responsável pela constante perpendicularidade entre placa e os raios solares, favorecendo a maior captação de energia luminosa.
Em suma, para a utilização e desenvolvimento desse equipamento é evidente o aprofundamento mais específico no estudo dos ventos, uma vez que , o mesmo se torna um dos fatores que podem influenciar de modo negativo o funcionamento da placa de base automatizada.
7. REFERÊNCIAS BIBLIOGRÁFICAS
CERQUEIRA, M. Desenvolvimento de atividades experimentais e de um kit de experimentos sobre geração fotovoltaica, 2019. Disponível em: <http://energif.mec.gov.br/images/materiais/materiais20.pdf>. Acesso em: 28 abr. 2022
BLOCKER, P. Aproveitamento inteligente de energia solar, 2018. Disponível em: <https://app.uff.br/riuff/bitstream/handle/1/7801/Projeto%20Final%20Philip%20Canabarro%20(sem%20assinaturas).pdf;jsessionid=03000037C5DCD6A5AE48A4D62EE0129F?sequence=1>. Acesso em: 28 abr. 2022
ALVES, G. Rastreador solar controlado por arduino, 2018. Disponível em: <https://repositorio.ufgd.edu.br/jspui/handle/prefix/2070>. Acesso em: 28 abr. 2022.
ANEXO 1
Segue o código desenvolvido para o protótipo.
#include <Servo.h> // Inclui a Biblioteca
#include "EmonLib.h" //INCLUSÃO DE BIBLIOTECA
#define CURRENT_CAL 18.40 //VALOR DE CALIBRAÇÃO (DEVE SER AJUSTADO EM PARALELO COM UM MULTÍMETRO MEDINDO A CORRENTE DA CARGA)
const int pinoSensor1 = A4; //PINO ANALÓGICO EM QUE O SENSOR ESTÁ CONECTADO
const int pinoSensor2 = A5; //PINO ANALÓGICO EM QUE O SENSOR ESTÁ CONECTADO
float ruido = 0.08; //RUÍDO PRODUZIDO NA SAÍDA DO SENSOR (DEVE SER AJUSTADO COM A CARGA DESLIGADA APÓS CARREGAMENTO DO CÓDIGO NO ARDUINO)
EnergyMonitor emon1; //CRIA UMA INSTÂNCIA
EnergyMonitor emon2; //CRIA UMA INSTÂNCIA
float Sensor = 0 ; // variavel que define a porta do sensores.
int linha = 0 ; // variavel que se refere as linhas do excel
int ETIQUETA1 = 1 ;
int ETIQUETA2 = 1 ;
int valor1 = 0 ; // variavel que guarda o valor lido do sensor 1
int valor2 = 0 ; // variavel que guarda o valor lido do sensor 2
Servo Horizontal; // Inicia o Servo da Horizontal
Servo Vertical; // Inicia o Servo da Vertical
int ServoHorizontal = 90; // Estabelece valor fixo à ServoHorizontal
int ServoVertical = 90; // Estabelece valor fixo à ServoVertical
int LimiteServoHorizontalMax = 360; // Estabele os limites de rotação
int LimiteServoHorizontalMin = 0; // Estabele os limites de rotação
int LimiteServoVerticalMax = 360; // Estabele os limites de rotação
int LimiteServoVerticalMin = 0; // Estabele os limites de rotação
int LDRDC = A0; // Inicia LDRDC no pino A0
int LDRDB = A1; // Inicia LDRDB no pino A1
int LDREC = A2; // Inicia LDREC no pino A2
int LDREB = A3; // Inicia LDREB no pino A3
void setup() {
Serial.begin(9600); //INICIALIZA A SERIAL
Serial. println ( "CLEARDATA" ) ; // Reinicia a comunicação serial
Serial. println ( "LABEL, Hora, Sensor R (A),Sensor E (A), Linha" ) ; // Nomeia como colunas
emon1.current(pinoSensor1, CURRENT_CAL); //PASSA PARA A FUNÇÃO OS PARÂMETROS (PINO ANALÓGIO / VALOR DE CALIBRAÇÃO)
emon2.current(pinoSensor2, CURRENT_CAL); //PASSA PARA A FUNÇÃO OS PARÂMETROS (PINO ANALÓGIO / VALOR DE CALIBRAÇÃO)
Horizontal.attach(3); // Inicia servo Horizontal na porta D3
Vertical.attach(5); // Inicia servo Vertical na porta D5
Horizontal.write(180); // Inicia servo Horizontal na posição 180
Vertical.write(45); // Inicia servo Horizontal na posição 45
delay(100); // Aguarda 0,1 segundos
}
void loop() {
int LDC = analogRead(LDRDC); // Leitura Analógica do LDR Direita Cima
int LEC = analogRead(LDREC); // Leitura Analógica do LDR Esquerda Cima
int LDB = analogRead(LDRDB); // Leitura Analógica do LDR Direita Baixo
int LEB = analogRead(LDREB); // Leitura Analógica do LDR Esquerda Baixo
int tol = 50;
int ValorSup = (LDC + LEC) / 2; // Média da leitura dos LDR superior
int ValorInf = (LDB + LEB) / 2; // Média da leitura dos LDR inferior
int ValorDir = (LDC + LDB) / 2; // Média da leitura dos LDR da direita
int ValorEsq = (LEC + LEB) / 2; // Média da leitura dos LDR da esquerda
int DifSupInf = ValorSup - ValorInf; // Diferença entre LED superior e inferior
int DifDirEsq = ValorDir - ValorEsq; // Diferença entre LED direita e esquerda
/*---------------------------------------------------*/
// Realiza a leitura e executa os movimentos referente ao Servo Vertical
if (-1 * tol > DifSupInf || DifSupInf > tol) {
if (ValorSup > ValorInf) {
ServoVertical = ++ServoVertical;
if (ServoVertical > LimiteServoVerticalMax) {
ServoVertical = LimiteServoVerticalMax;
}
}
else if (ValorSup < ValorInf) {
ServoVertical = --ServoVertical;
if (ServoVertical < LimiteServoVerticalMin) {
ServoVertical = LimiteServoVerticalMin;
}
}
Vertical.write(ServoVertical);
}
// Realiza a leitura e executa os movimentos referente ao Servo Horizontal
if (-1 * tol > DifDirEsq || DifDirEsq > tol) {
if (ValorDir > ValorEsq) {
ServoHorizontal = --ServoHorizontal;
if (ServoHorizontal < LimiteServoHorizontalMin) {
ServoHorizontal = LimiteServoHorizontalMin;
}
}
else if (ValorDir < ValorEsq) {
ServoHorizontal = ++ServoHorizontal;
if (ServoHorizontal > LimiteServoHorizontalMax) {
ServoHorizontal = LimiteServoHorizontalMax;
}
}
else if (ValorDir = ValorEsq) {
}
Horizontal.write(ServoHorizontal);
}
emon1.calcVI(17, 300); //FUNÇÃO DE CÁLCULO (17 SEMICICLOS / TEMPO LIMITE PARA FAZER A MEDIÇÃO)
double currentDraw_1 = emon1.Irms; //VARIÁVEL RECEBE O VALOR DE CORRENTE RMS OBTIDO
emon2.calcVI(17, 300); //FUNÇÃO DE CÁLCULO (17 SEMICICLOS / TEMPO LIMITE PARA FAZER A MEDIÇÃO)
double currentDraw_2 = emon2.Irms; //VARIÁVEL RECEBE O VALOR DE CORRENTE RMS OBTIDO
linha ++; // incrementa a linha do excel para que a leitura pule de linha em linha
Serial. print ( "DATA,TIME" ) ;
Serial. print ( ",");
Serial.print(currentDraw_1); //IMPRIME NA SERIAL O VALOR DE CORRENTE MEDIDA
Serial. print ( ",");
Serial.print(currentDraw_2); //IMPRIME NA SERIAL O VALOR DE CORRENTE MEDIDA
Serial. print ( ",");
Serial. println ( linha ) ;
delay(100); // Aguarda 0,1 segundo
}
Video do Projeto em funcionamento